linear algebra
참고 : 무료 교재 http://www.kms.or.kr/board/list.html?num=6383&start=330&code=absinfo
스칼라 scalar
- 하나의 수치(數値)만으로 완전히 표시되는 양
- 방향의 구별이 없는 물리적 수량
- 질량·에너지·밀도(密度)·전기량(電氣量) 등
- 1, 3.14, -5, 1.2e5
import numpy as np
a = np.array(1) # 1차원 배열로 벡터를 나타낸다
print(a.ndim, a.shape)벡터 vector
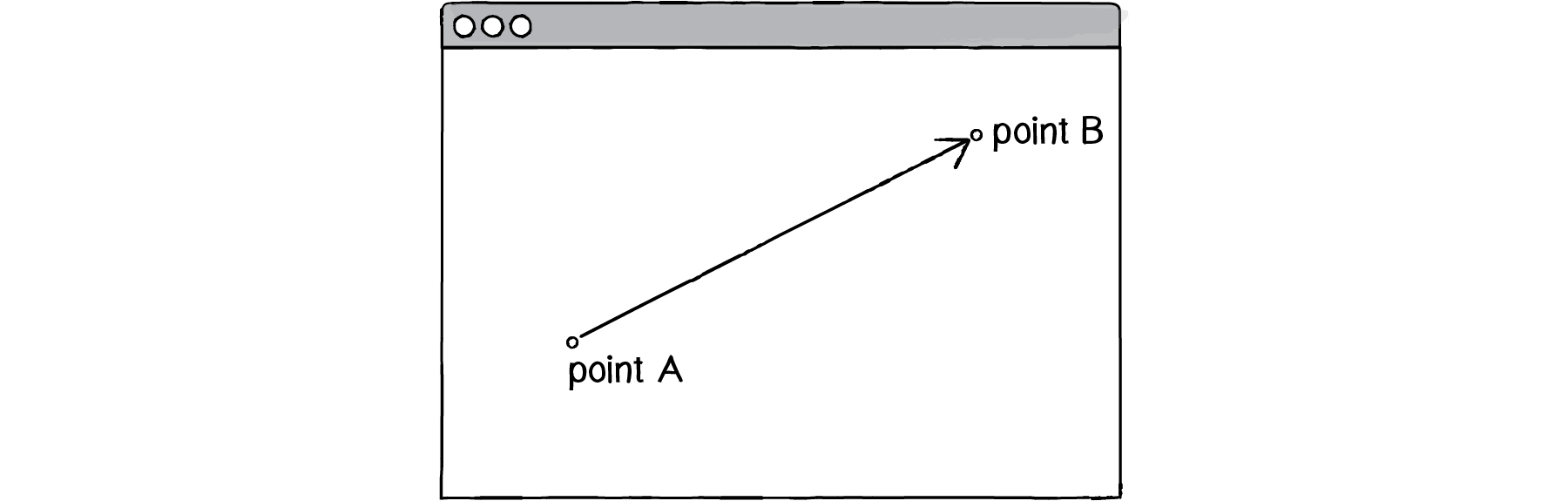
- 벡터는 사물의 움직임을 프로그래밍하기 위한 가장 기본적인 구성요소
- 물리학에서 말하는 ‘크기와 방향으로 정의되는 값'
- 일반적으로 벡터는 화살표로 표현
- 화살표가 가리키는 쪽은 방향을 나타내며 화살표의 길이는 크기
- 순서를 맞춰 숫자를 나열한 리스트
- 벡터는 하나의 데이터 포인트라는 관점에서 매우 유용
- 차원을 무한히 늘릴 수있음
- 수학적으로 가장 의미있는 정의는 벡터란 그저 벡터 공간(vector space)의 원소
- https://angeloyeo.github.io/2020/09/07/basic_vector_operation.html#%EB%B2%A1%ED%84%B0-%EA%B0%84%EC%9D%98-%EC%84%A0%ED%98%95-%EA%B2%B0%ED%95%A9
$$ \vec{q} = (q_1, q_2, ..., q_n) $$
벡터 - numpy 1차원 배열
import numpy as np
a = np.array([1, 2, 3]) # 1차원 배열로 벡터를 나타낸다
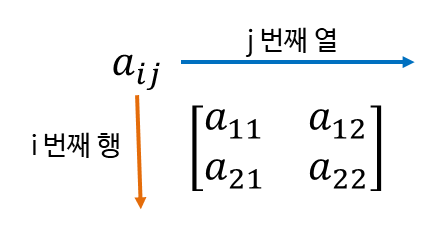
print(a.ndim, a.shape)행렬 matrix
- 수(스칼라) 또는 다항식 등을 직사각형 모양으로 배열한 것
- 수평방향을 행, 수직방향을 열
행렬 - numpy 2차원 배열
import numpy as np
a = np.array([[1, 2, 3],
[4, 5, 6]]) # 2×3의 행렬
print(a.ndim, a.shape)텐서 tensor
- Tensor 는 수학과 물리학에서 서로 약간 다른 의미로 사용되는 개념
- 텐서란 매우 수학적인 개념으로 데이터의 배열
- 스칼라를 여러 개의 차원으로 나열한 것

3차원 텐서 - numpy 3차원 배열
import numpy as np
a = np.array([[[0, 1, 2, 3],
[2, 3, 4, 5],
[4, 5, 6, 7]],
[[1, 2, 3, 4],
[3, 4, 5, 6],
[5, 6, 7, 8]]]) # (2, 3, 4)의 3차원 텐서
print(a.ndim, a.shape)자연어 처리 예시
# Hi Foo
# Hi Bar
# Hi Baz
hi = np.array([1,0,0,0])
foo = np.array([0,1,0,0])
bar = np.array([0,0,1,0])
baz = np.array([0,0,0,1])
# matrix
hi_foo = np.array([hi,king])
hi_bar = np.array([hi,queen])
hi_baz= np.array([hi,jack])
# 3d-tensor
his = np.array([hi_foo, hi_bar, baz])
his.ndim, his.shape백터의 내적
- 벡테의 각 요소끼리 곱한 값의 총합
- 두 벡터의 요소 수가 동일 해야함
- numpy의 dot()
$$ \vec{a} = (a_1,a_2,...,a_n) $$
$$ \vec{b} = (b_1,b_2,...,b_n) $$
$$ \vec{a} \cdot \vec{b} = (a_1b_1 + a_2b_2 + ... + a_nb_n) $$
$$ \vec{a} \cdot \vec{b} = \sum_{k=1}^N a_k b_k $$
import numpy as np
a = np.array([1, 2, 3])
b = np.array([3, 2, 1])
r1 = np.dot(a,b)
r2 = np.sum(a*b)벡터의 크기 : 놈(노름) norm
- numpy의 linalg.norm() 함수
- L1 놈, L2 놈
L2 놈
- 벡터의 각 요소의 제곱합에 제곱근으로 구함
$$ \lVert \vec{x} \rVert_2 = \sqrt{x_1^2 + x_2^2 + ... + x_n^2} $$
L1 놈
- 벡터의 각 요소의 절대값의 총합으로 구함
$$ \lVert \vec{x} \rVert_1 = \left\vert x_1 \right\vert + \left\vert x_2 \right\vert + ... + \left\vert x_n \right\vert $$
import numpy as np
a = np.array([1, 1, -1, -1])
print("--- L2놈 ---")
print(np.linalg.norm(a)) # L2놈(디폴트)
print("--- L1놈 ---")
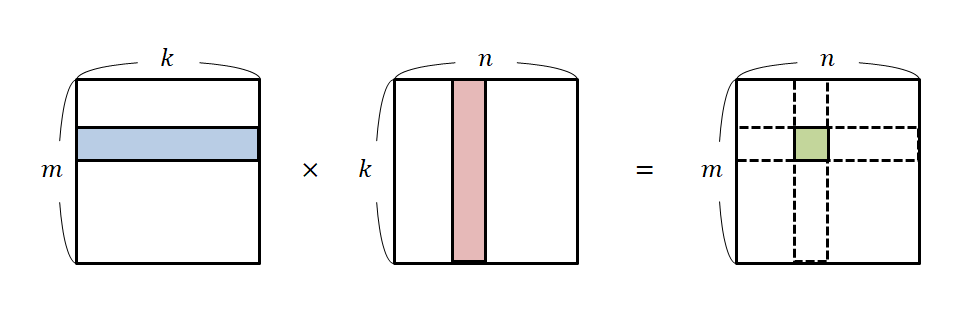
print(np.linalg.norm(a, 1)) # L1놈행렬의 곱
- 벡터의 내적을 행렬로 확장
- AI에서 많이 사용됨
import numpy as np
a = np.array([[0, 1, 2],
[1, 2, 3]])
b = np.array([[2, 1],
[2, 1],
[2, 1]])
r1 = np.dot(a,b)
r2 = np.sum(a*b)요소별 곱(아다마르 곱)
- 행렬의 각 요소별 곱
import numpy as np
a = np.array([[1, 2, 3],
[4, 5, 6],
[7, 8, 9]])
b = np.array([[9, 8, 7],
[6, 5, 4],
[3, 2, 1]])
print(a*b)행렬 전치
- 행과 열을 바꿈
import numpy as np
a = np.array([[1, 2, 3],
[4, 5, 6]]) # 행렬
print(a.T) # 전치전치와 행렬곱 구현
import numpy as np
a = np.array([[0, 1, 2],
[1, 2, 3]]) # 2×3의 행렬
b = np.array([[0, 1, 2],
[1, 2, 3]]) # 2×3의 행렬 이대로는 행렬곱을 할 수 없다
# print(np.dot(a, b)) # 전치하지 않고 행렬곱을 취하면 에러단위행렬과 역행렬
단위 행렬(항등 행렬)
- 주대각선의 원소가 모두 1이며 나머지 원소는 모두 0인 정사각 행렬
- AE=EA=A, E 대한 항등원
- 행렬곱 결과가 자기 자신
import numpy as np
print(np.eye(2)) # 2×2의 단위 행렬
print()
print(np.eye(3)) # 3×3의 단위 행렬
print()
print(np.eye(4)) # 4×4의 단위 행렬E = np.eye(2)
A = np.array([[1,2],[3,4]])
A == A.dot(E)역행렬
- 행렬곱에서 단위행렬이 나오게 하는 행렬
- 역행렬이 존재하지 않는 행렬도 있음
- 역행렬 존재 여부 => numpy linalg.det() 사용
- 역행렬 존재 시 => numpy linalg.inv() 사용
역행렬 존재여부
iimport numpy as np
# 역행렬 존재
a = np.array([[1, 2],
[3, 4]])
print(a[0,0]*a[1,1] - a[0,1]*a[1,0]) # ad - bc
print(np.linalg.det(a)) # 행렬식이 0이 되지 않는 경우
# 역행렬 미존재
b = np.array([[1, 3],
[1, 3]])
print(b[0,0]*b[1,1] - b[0,1]*b[1,0]) # ad -bc
print(np.linalg.det(b)) # 행렬식이 0이 되는 경우역행렬 구하기
import numpy as np
# 역행렬 존재
a = np.array([[1, 2],
[3, 4]])
check = (a[0,0]*a[1,1] - a[0,1]*a[1,0]) # ad - bc
if check != 0:
print('a check : ', np.linalg.inv(a)) # 행렬식이 0이 되지 않는 경우
# 역행렬 미존재
b = np.array([[1, 3],
[1, 3]])
check = (b[0,0]*b[1,1] - b[0,1]*b[1,0]) # ad -bc
if check != 0:
print('b check : ', np.linalg.inv(b)) # 행렬식이 0이 되는 경우선형변환
- 벡터 공간에서 벡터 공간으로 가는 함수로, 그것들 중 벡터 공간의 성질을 보존하는, 즉 선형성을 갖는 함수
quiver() : 벡터 그리기
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
# 화살표를 그리는 함수
def arrow(start, size, color):
plt.quiver(start[0], start[1],
size[0], size[1],
angles="xy",
scale_units="xy",
scale=1, color=color)
# 화살표의 시작점
s = np.array([0, 0]) # 원점
# 벡터
v = np.array([2, 3]) # 세로 벡터를 나타낸다
arrow(s, v, color="black")
# 그래프 표시
plt.xlim([-3,3]) # x의 표시 범위
plt.ylim([-3,3]) # y의 표시 범위
plt.xlabel("x", size=14)
plt.ylabel("y", size=14)
plt.grid()
plt.gca().set_aspect("equal") # 가로세로비를 같게
plt.show()선형변환
$$ A = {2 -1 \choose 2 -2} , \hat{a} = {2 \choose 3} $$
$$ \hat{b} = A\hat{a} = A = {2 -1 \choose 2 -2} {2 \choose 3} $$
import numpy as np
import matplotlib.pyplot as plt
a = np.array([2, 3]) # 변환 전의 벡터
A = np.array([[2, -1],
[2, -2]])
b = np.dot(A, a) # 선형변환
print("변환 전의 벡터(a):", a)
print("변환 후의 벡터(b):", b)
def arrow(start, size, color):
plt.quiver(start[0], start[1], size[0],
size[1], angles="xy", scale_units="xy", scale=1, color=color)
s = np.array([0, 0]) # 원점
arrow(s, a, color="black")
arrow(s, b, color="blue")
# 그래프 표시
plt.xlim([-3,3]) # x의 표시 범위
plt.ylim([-3,3]) # y의 표시 범위
plt.xlabel("x", size=14)
plt.ylabel("y", size=14)
plt.grid()
plt.gca().set_aspect("equal") # 가로세로비를 같게
plt.show()표준기저
- 벡터는 표준기저와 상수의 곱의 합으로 표현 가능
$$ \vec{e}_x = {1 \choose 0}, \vec{e}_y = {0 \choose 1} $$
$$ \hat{a} = {3 \choose 2} = 2 {1 \choose 0} + 3 {0 \choose 1} = 2\vec{e}_x + 3\vec{e}_y $$
import numpy as np
import matplotlib.pyplot as plt
a = np.array([2, 3])
e_x = np.array([1, 0]) # 표준기저
e_y = np.array([0, 1]) # 표준기저
print("a:", a)
print("e_x:", e_x)
print("e_y:", e_y)
def arrow(start, size, color):
plt.quiver(start[0], start[1], size[0],
size[1], angles="xy",
scale_units="xy", scale=1, color=color)
s = np.array([0, 0]) # 원점
arrow(s, a, color="blue")
arrow(s, e_x, color="black")
arrow(s, e_y, color="black")
# 그래프 표시
plt.xlim([-3,3]) # x의 표시 범위
plt.ylim([-3,3]) # y의 표시 범위
plt.xlabel("x", size=14)
plt.ylabel("y", size=14)
plt.grid()
plt.gca().set_aspect("equal") # 가로세로비를 같게
plt.show()고윳값과 고유벡터
- 머신러닝 주성분 분석 기법에 활용
$$ A\vec{x} = \lambda\vec{x} $$
- 고윳값 스칼라 : $$ \lambda $$
- 고유벡터 : $$ \vec{x} $$
- Numpy의 linalg.eig()함수 사용
import numpy as np
a = np.array([[3, 1],
[2, 4]])
ev = np.linalg.eig(a) # 고유값과 고유 벡터를 동시에 구한다
print(ev[0]) # 첫 요소는 고유값
print()
print(ev[1]) # 다음 요소는 고유 벡터코사인 유사도
- 코사인 유사도는 두 벡터가 이루는 각도를 통해 유사도를 측정하는 방식
- 코사인의 값은 두개의 벡터 방향이 얼마나 일치하는 지 나타냄
/download.png)
/cosinesimilarityfq1.png)
import numpy as np
def cos_sim(vec_1, vec_2):
return np.dot(vec_1, vec_2) / (np.linalg.norm(vec_1) * np.linalg.norm(vec_2))
a = np.array([2, 2, 2, 2])
b = np.array([1, 1, 1, 1]) # a와 같은 방향
c = np.array([-1, -1, -1, -1]) # a와 반대 방향
print("--- a와 b의 코사인 유사도 ----")
print(cos_sim(a, b))
print("--- a와 c의 코사인 유사도 ----")
print(cos_sim(a, c))